室工大ニュース
JAXA/ISAS TAG-SPチームと固体ロケットモーターによるタッチアンドゴー試験を実施しました
室蘭工業大学航空宇宙機システム研究センターは、宇宙航空研究開発機構・宇宙科学研究所(JAXA/ISAS)のTAG-SP(タッチ・アンド・ゴーサンプリングプローブ)チームと白老エンジン実験場において固体ロケットモーターによるタッチアンドゴー試験を実施しました。
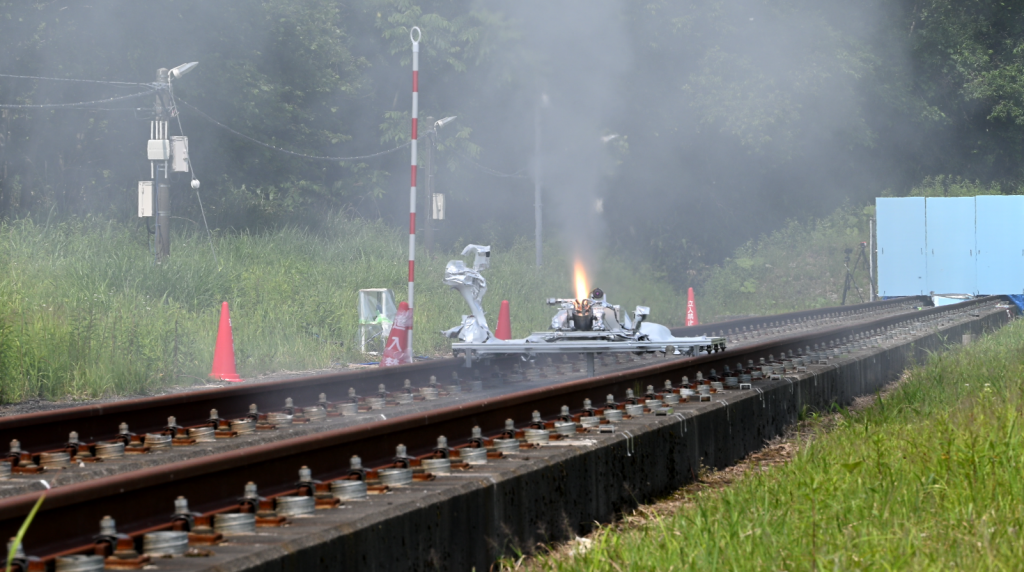
本試験は高速軌道上を走行する台車を探査機と見立て、目標地点に対し台車の位置と速度を制御することでタッチアンドゴー(減速降下~着陸~再浮上)の実証をおこなうものです。高速軌道設備の走行台車を天体重力相当の加速度で走行させることで探査機の着陸降下環境を模擬し、その環境下において固体ロケットモーターによる推力偏向制御をおこなうことで探査機のタッチアンドゴーをおこないます。これらのタッチアンドゴーシーケンスには、センシングによる探査機の状態把握、着陸再浮上誘導制御、固体ロケットモーターの運用と推力偏向制御の技術が必要となります。
試験では、固体ロケットモーターによるタッチアンドゴー試験を 1 回実施しました。台車走行による探査機の着陸降下環境において、固体ロケットモーターを作動させ、設計した誘導制御則に従い推力偏向をおこない、目標地点に対し減速降下~着陸~再浮上までの一連のタッチアンドゴーシーケンスを達成しました。本試験により、探査機に固体ロケットモーターを適用するための技術成果を得ることができ、実際に運用するための技術課題が明らかになりました。
本研究は、小重力天体に対し固体ロケットモーターによる探査機サンプリングリターンを実現するための技術として実施しています。今後は、今回の試験を継続して取り組んでいくとともに、固体ロケットモーター推力偏向による探査機の姿勢制御にも取り組んでいきます。
本研究は、科研費基盤研究(B)「遠方天体表面マルチアクセス技術の実現 -自在な宇宙探査のための探査工学」、JAXA/ISAS戦略的開発研究費(工学)の助成を受け、実施されたものです。